4.1. Image Classification#
In this tutorial we will learn how to train an image classification deep neural network. The input to the network is an image and the network’s output is the category of that image.
We explore a few new toy examples all in images of small resolution (\(\le32 \times 32\)):
MNIST: grey-scale digit recognition from 0 to 9.

Fashion-MNIST grey-scale image recognition among 10 categories.
CIFAR10: object recognition among 10 categories.
Packages#
Let’s start with all the necessary packages to implement this tutorial.
numpy is the main package for scientific computing with Python. It’s often imported with the
npshortcut.argparse is a module making it easy to write user-friendly command-line interfaces.
matplotlib is a library to plot graphs in Python.
os provides a portable way of using operating system-dependent functionality, e.g., modifying files/folders.
torch is a deep learning framework that allows us to define networks, handle datasets, optimise a loss function, etc.
# importing the necessary packages/libraries
import numpy as np
import argparse
from matplotlib import pyplot as plt
import random
import os
import math
import torch
import torch.nn as nn
import torchvision
device#
Choosing CPU or GPU based on the availability of the hardware.
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
arguments#
We use the argparse module to define a set of parameters that we use throughout this notebook:
The
argparseis particularly useful when writing Python scripts, allowing you to run the same script with different parameters (e.g., for doing different experiments).In notebooks using
argparseis not necessarily beneficial, we could have hard-coded those values directly in variables, but here we useargparsefor learning purposes.
parser = argparse.ArgumentParser()
parser.add_argument("--n_epochs", type=int, default=20, help="number of epochs of training")
parser.add_argument("--batch_size", type=int, default=128, help="size of the batches")
parser.add_argument("--lr", type=float, default=0.0002, help="adam: learning rate")
parser.add_argument("--img_size", type=int, default=32, help="size of each image dimension")
parser.add_argument("--channels", type=int, default=1, help="number of image channels")
parser.add_argument("--out_dir", type=str, default="./gan_out/", help="the output directory")
parser.add_argument("--dataset", type=str, default="mnist",
choices=["mnist", "fashion-mnist", "cifar10"], help="which dataset to use")
def set_args(*args):
# we can pass arguments to the parse_args function to change the default values.
opt = parser.parse_args([*args])
# adding the dataset to the out dir to avoid overwriting the generated images
opt.out_dir = "%s/%s/" % (opt.out_dir, opt.dataset)
# the images in cifar10 are colourful
if opt.dataset == "cifar10":
opt.channels = 3
# creating the output directory
os.makedirs(opt.out_dir, exist_ok=True)
return opt
opt = set_args("--n_epochs", "5", "--dataset", "cifar10")
print(opt)
Namespace(n_epochs=5, batch_size=128, lr=0.0002, img_size=32, channels=3, out_dir='./gan_out//cifar10/', dataset='cifar10')
Architectures#
We will create a simple ResNet network.
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, in_planes, planes, stride=1):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(in_planes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, self.expansion * planes, kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(self.expansion*planes)
self.shortcut = nn.Sequential()
if stride != 1 or in_planes != self.expansion*planes:
self.shortcut = nn.Sequential(
nn.Conv2d(in_planes, self.expansion*planes, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(self.expansion*planes)
)
def forward(self, x):
out = torch.relu(self.bn1(self.conv1(x)))
out = torch.relu(self.bn2(self.conv2(out)))
out = self.bn3(self.conv3(out))
out += self.shortcut(x)
out = torch.relu(out)
return out
class ResNet(nn.Module):
def __init__(self, num_blocks, num_classes=10):
super(ResNet, self).__init__()
block = Bottleneck
self.in_planes = 64
self.conv1 = nn.Conv2d(3, 64, kernel_size=3,
stride=1, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.layer1 = self._make_layer(block, 64, num_blocks[0], stride=1)
self.layer2 = self._make_layer(block, 128, num_blocks[1], stride=2)
self.layer3 = self._make_layer(block, 256, num_blocks[2], stride=2)
self.layer4 = self._make_layer(block, 512, num_blocks[3], stride=2)
self.avgpool = torch.nn.AdaptiveAvgPool2d((1, 1))
self.linear = nn.Linear(512*block.expansion, num_classes)
def _make_layer(self, block, planes, num_blocks, stride):
strides = [stride] + [1]*(num_blocks-1)
layers = []
for stride in strides:
layers.append(block(self.in_planes, planes, stride))
self.in_planes = planes * block.expansion
return nn.Sequential(*layers)
def forward(self, x):
out = torch.relu(self.bn1(self.conv1(x)))
out = self.layer1(out)
out = self.layer2(out)
out = self.layer3(out)
out = self.layer4(out)
out = self.avgpool(out)
out = out.view(out.size(0), -1)
out = self.linear(out)
return out
Dataset#
We explore three datasets all already implemented in torchvision. The first time will be automatically downloaded (in “./data/” directory) the first time if already it doesn’t exist.
def get_dataloader(opt, transform, split):
train = split == 'train'
if opt.dataset == "mnist":
dataset = torchvision.datasets.MNIST("./data/", train=train, download=True, transform=transform)
elif opt.dataset == "fashion-mnist":
dataset = torchvision.datasets.FashionMNIST("./data/", train=train, download=True, transform=transform)
else:
dataset = torchvision.datasets.cifar.CIFAR10("./data/", train=train, download=True, transform=transform)
return torch.utils.data.DataLoader(dataset, batch_size=opt.batch_size, shuffle=train)
Transform functions#
We resize all images to specified image size (opt.img_size), converting them to Tensor and normalising the inputs (Normalize).
# make the pytorch datasets
mean = 0.5
std = 0.5
transform = torchvision.transforms.Compose([
torchvision.transforms.Resize(opt.img_size),
torchvision.transforms.ToTensor(),
torchvision.transforms.Normalize(mean, std)
])
train_dataloader = get_dataloader(opt, transform, 'train')
val_dataloader = get_dataloader(opt, transform, 'val')
print(f"Training samples: {train_dataloader.dataset.__len__()}")
print(f"Validation samples: {val_dataloader.dataset.__len__()}")
Files already downloaded and verified
Files already downloaded and verified
Training samples: 50000
Validation samples: 10000
Visualisation#
Let’s visualise a few samples from our dataset.
fig = plt.figure(figsize=(5, 5))
for i in range(25):
img, target = train_dataloader.dataset.__getitem__(i)
ax = fig.add_subplot(5, 5, i+1)
ax.imshow(img.numpy().transpose(1, 2, 0) * std + mean, cmap='gray')
ax.axis('off')
Training#
def accuracy(output, target, topk=(1,)):
"""Computes the accuracy over the k top predictions for the specified values of k"""
with torch.no_grad():
maxk = max(topk)
batch_size = target.size(0)
_, pred = output.topk(maxk, 1, True, True)
pred = pred.t()
correct = pred.eq(target.view(1, -1).expand_as(pred))
res = []
for k in topk:
correct_k = correct[:k].reshape(-1).float().sum(0, keepdim=True)
res.append(correct_k.mul_(100.0 / batch_size))
return res
Setup Networks and Optimiser#
model = ResNet([1, 1, 1, 1])
model = model.to(device)
criterion = nn.CrossEntropyLoss().to(device)
optimiser = torch.optim.SGD(model.parameters(), lr=0.001, momentum=0.9)
Running epochs#
def epoch_loop(model, db_loader, criterion, optimiser):
# usually the code for train/test has a large overlap.
is_train = False if optimiser is None else True
# model should be in train/eval model accordingly
model.train() if is_train else model.eval()
accuracies = []
losses = []
with torch.set_grad_enabled(is_train):
for batch_ind, (img, target) in enumerate(db_loader):
# moving the image and GT to device
img = img.to(device)
target = target.to(device)
output = model(img)
# computing the loss function
loss = criterion(output, target)
losses.extend([loss.item() for i in range(img.size(0))])
# computing the accuracy
acc = accuracy(output, target)[0].cpu().numpy()
accuracies.extend([acc[0] for i in range(img.size(0))])
if is_train:
# compute gradient and do SGD step
optimiser.zero_grad()
loss.backward()
optimiser.step()
return accuracies, losses
# doing epoch
epochs = opt.n_epochs
initial_epoch = 0
train_logs = {'acc': [], 'loss': []}
val_logs = {'acc': [], 'loss': []}
for epoch in range(initial_epoch, epochs):
train_log = epoch_loop(model, train_dataloader, criterion, optimiser)
val_log = epoch_loop(model, val_dataloader, criterion, None)
print('[%.2d] Train loss=%.4f acc=%0.2f [%.2d] Test loss=%.4f acc=%0.2f' %
(
epoch, np.mean(train_log[1]), np.mean(train_log[0]),
epoch, np.mean(val_log[1]), np.mean(val_log[0])
))
train_logs['acc'].append(np.mean(train_log[0]))
train_logs['loss'].append(np.mean(train_log[1]))
val_logs['acc'].append(np.mean(val_log[0]))
val_logs['loss'].append(np.mean(val_log[1]))
[00] Train loss=1.6928 acc=38.68 [00] Test loss=1.4290 acc=47.54
[01] Train loss=1.3071 acc=53.07 [01] Test loss=1.2453 acc=55.14
[02] Train loss=1.1262 acc=60.01 [02] Test loss=1.1707 acc=57.90
[03] Train loss=0.9867 acc=65.07 [03] Test loss=1.0636 acc=62.38
[04] Train loss=0.8722 acc=69.56 [04] Test loss=1.0395 acc=63.26
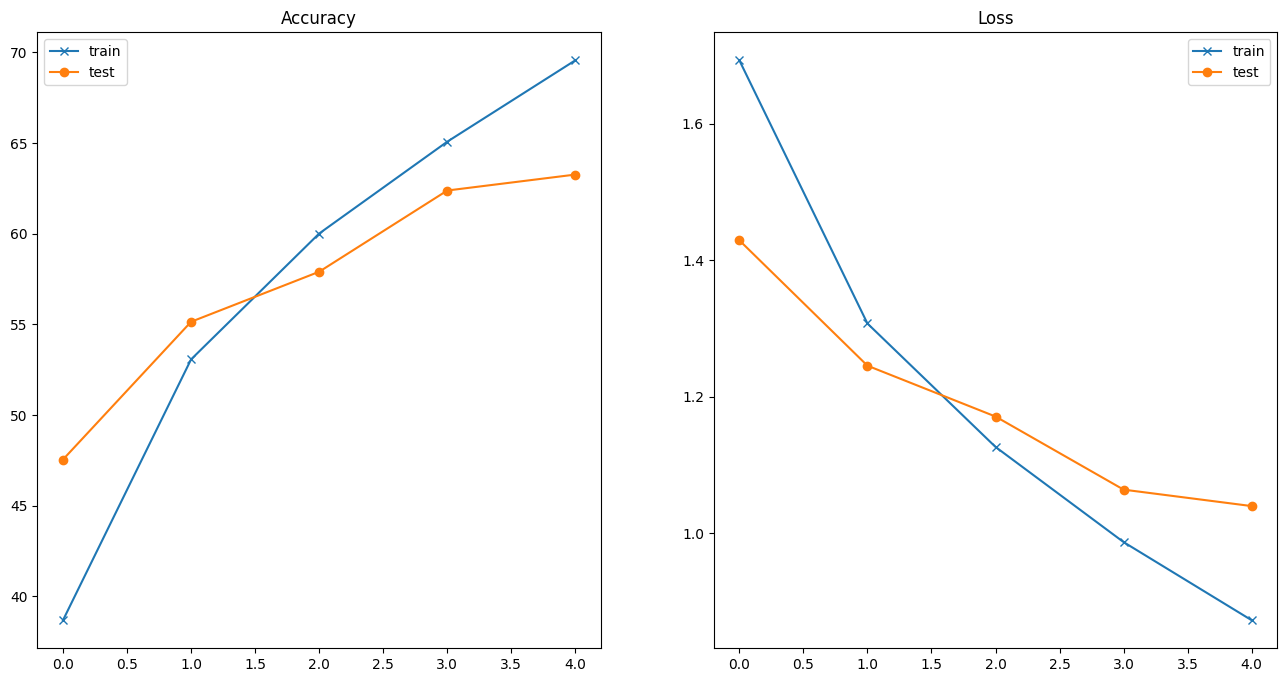
Results#
Let’s look at the accuracies and losses by plotting them as a function of epoch numbers. These figures can help us to evaluate whether the hyperparameters are good.
fig = plt.figure(figsize=(16, 8))
ax = fig.add_subplot(1, 2, 1)
ax.plot(train_logs['acc'], '-x', label='train')
ax.plot(val_logs['acc'], '-o', label='test')
ax.set_title('Accuracy')
ax.legend()
ax = fig.add_subplot(1, 2, 2)
ax.plot(train_logs['loss'], '-x', label='train')
ax.plot(val_logs['loss'], '-o', label='test')
ax.set_title('Loss')
ax.legend()
<matplotlib.legend.Legend at 0x77f23583f4f0>
Let’s now visually show some results. We will run the network against one batch of validation set.
with torch.no_grad():
for data_ind, data in enumerate(val_dataloader):
images, labels = data
# calculate outputs by running images through the network
outputs = model(images.to(device))
# the class with the highest energy is what we choose as prediction
_, predicted = torch.max(outputs.data, 1)
break # we just run it for one batch
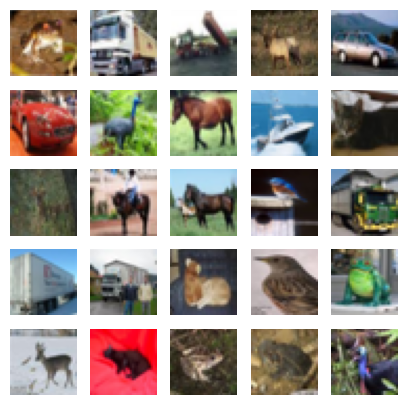
We visualise 128 images. The panel’s titles correspond to network’s prediction. They are colour-coded: green means correct and red means incorrect.
fig = plt.figure(figsize=(10, 11))
for i in range(64):
ax = fig.add_subplot(8, 8, i+1)
ax.imshow(images[i].detach().cpu().numpy().transpose(1, 2, 0) * std + mean)
ax.axis('off')
colour = 'green' if predicted[i] == labels[i] else 'red'
ax.set_title(f"{val_dataloader.dataset.classes[predicted[i]]}", {'color':colour})
