9. Reinforcement Learning#
This tutorial shows how to use PyTorch to train a Deep Q-Network (DQN) on the Frozen Lake environment, which involves crossing a frozen lake from start to goal without falling into any holes by walking over the frozen lake. The player may not always move in the intended direction due to the slippery nature of the frozen lake.
In reinforcement learning, an agent learns how to behave in an environment by performing actions (through trial and error) and seeing the results (receiving negative or positive feedback). The exploration/exploitation trade-off is an important topic in reinforcement learning methods. An agent should exploit previously acquired information to maximise the reward. At the same time, the agent should explore the environment to find new information.

0. Preparation#
To run this notebook, we need to perform some preparations.
We use the Frozen Lake environment from the gymnasium package- In Google Colab you
can install it by uncommenting and executing the following code cell.
#!pip install gymnasium[classic_control]
Packages#
Let’s start with all the necessary packages to implement this tutorial.
numpy is the main package for scientific computing with Python. It’s often imported with the
npshortcut.os provides a portable way of using operating system-dependent functionality, e.g., modifying files/folders.
argparse is a module making it easy to write user-friendly command-line interfaces.
cv2 is a leading computer vision library.
matplotlib is a library to plot graphs in Python.
IPython.display is a library to display tools in IPython.
torch is a deep learning framework that allows us to define networks, handle datasets, optimise a loss function, etc.
gymnasium is a standard API for reinforcement learning and a diverse collection of reference environments.
import numpy as np
import os
import argparse
import random
from itertools import count
from collections import namedtuple, deque
import cv2
import matplotlib.animation as animation
import matplotlib.pyplot as plt
import IPython.display as ipd
import torch
from torch import nn
import gymnasium as gym
device#
Choosing CPU or GPU based on the availability of the hardware.
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
print('Selected device:', device)
Selected device: cuda
arguments#
We use the argparse module to define a set of parameters that we use throughout this notebook:
The
argparseis particularly useful when writing Python scripts, allowing you to run the same script with different parameters (e.g., for doing different experiments).In notebooks, using
argparseis not necessarily beneficial. We could have hard-coded those values directly in variables, but here we useargparsefor three reasons:Learning purposes
Making the code more modular
Facilitating the process of conducting different experiments
parser = argparse.ArgumentParser()
parser.add_argument("--episodes", type=int, default=2000, help="number of training episodes")
parser.add_argument("--batch_size", type=int, default=128, help="the number of transitions sampled from the replay buffer")
parser.add_argument("--n_runs", type=int, default=20, help="Number of runs")
parser.add_argument("--lr", type=float, default=1e-3, help="Learning rate")
parser.add_argument("--gamma", type=float, default=0.95, help="Discounting rate")
parser.add_argument("--tau", type=float, default=0.005, help="target network update rate")
parser.add_argument("--max_eps", type=float, default=1.0, help="Maximum value of epsilon")
parser.add_argument("--min_eps", type=float, default=0.01, help="Minimum value of epsilon")
parser.add_argument("--eps_decay", type=float, default=1e-3, help="exponential decay of epsilon")
parser.add_argument("--embedding_dim", type=float, default=256, help="Network's embedding size")
parser.add_argument("--log_frequency", type=int, default=100, help="interval between log prints")
parser.add_argument("--out_dir", type=str, default="./out/dqn_out/", help="the output directory")
def set_args(*args):
# we can pass arguments to the parse_args function to change the default values.
opt = parser.parse_args([*args])
# setting the device
opt.device = device
# creating the output directory
os.makedirs(opt.out_dir, exist_ok=True)
return opt
1. Environment#
In this tutorial, we use the Frozen Lake environment that occurs over a grid world of size \(W \times H\). We construct a small \(4 \times 4\) map.
The game starts with the player at location [0,0] of the frozen lake grid world with
the goal located at the far extent of the world, e.g., [3,3] for the \(4 \times 4\) environment.
At each time step, the player can take one of the following four actions:
Move left
Move down
Move right
Move up
When is_slippery=True, the player will move in the intended direction with a probability of \(\frac{1}{3}\) else will move in either perpendicular direction with an equal probability of \(\frac{1}{3}\) in both directions.
For example, if action is left (\(\leftarrow\)) and is_slippery=True, then:
\(P(\leftarrow)=\frac{1}{3}\)
\(P(\uparrow)=\frac{1}{3}\)
\(P(\downarrow)=\frac{1}{3}\)
The environment returns the following rewards:
Reach goal: +1
Reach hole: 0
Reach frozen: 0
The game ends when:
The player falls into a hole :(
The player reaches the goal :)
Creation#
Let’s create an instance of our word and take some random actions to familiarise ourselves with the game.
One can easily change the environment settings. For instance, the map_name variable controls the environment size.
env = gym.make("FrozenLake-v1", desc=None, map_name="4x4", is_slippery=True, render_mode="rgb_array")
_ = env.reset()
print('Environment state size: %d' % env.observation_space.n)
print('Environment action size: %d' % env.action_space.n)
Environment state size: 16
Environment action size: 4
Random steps#
Let’s make 100 random steps to see how far our agent gets!
env_rendered_imgs = []
for _ in range(100):
# get the current map
env_img = env.render()
# resize it to a smaller resolution and add it to the list
env_rendered_imgs.append(cv2.resize(env_img, (0, 0), fx=0.7, fy=0.7))
# take a random action
env.step(env.action_space.sample())
In the interactive panel below, we can see that our agent falls into a frozen lake after a few random steps.
fig = plt.figure(figsize=(5, 4))
plt.axis("off")
imgs_map = [[plt.imshow(img_i, animated=True)] for img_i in env_rendered_imgs]
animated_map = animation.ArtistAnimation(fig, imgs_map, interval=1000, repeat_delay=1000, blit=True)
plt.close('all')
ipd.HTML(animated_map.to_jshtml())
It is not surprising that random steps results in falling into frozen lakes. We need an intelligent agent to solve this task! To do so, we design a neural network.
2. Network#
We use Deep Q-Learning in this tutorial and our neural network (DQN) aims to learn a policy that maximises the discounted, cumulative reward \(R_{t_0} = \sum_{t=t_0}^{\infty} \gamma^{t - t_0} r_t\), where \(R_{t_0}\) is also known as the return:
The discount, \(\gamma\), should be a constant between \(0\) and \(1\) that ensures the sum converges.
A lower \(\gamma\) prioritises near-future awards than far-future ones.
The main idea behind Q-learning is that if we had a function \(Q^*: State \times Action \rightarrow \mathbb{R}\), that could tell us what would be the action’s reward in a given state, then we could easily construct a policy that maximises our rewards:
\begin{align}\pi^(s) = \arg!\max_a \ Q^(s, a)\end{align}
However, the network does not have direct access to \(Q^*\) (it does not know everything about the world). Therefore, we use neural networks as universal function approximators to create \(\hat{Q}^*\) that resembles the true \(Q^*\).
Experience Replay#
The DQN uses the experience replay, a biologically inspired mechanism that uses a random sample of prior actions instead of the most recent action to proceed. To do so, we need to store the transitions that the agent observes, allowing us to reuse this data later. By sampling from it randomly, the transitions that build up a batch are decorrelated. It has been shown that this greatly stabilises and improves the DQN training procedure.
For this, we define two classes:
Transition– a named tuple representing a single transition in the environment. It essentially maps(state, action)pairs to their(next_state, reward)result, with the state being the screen difference image as described later on.ExperienceReplay– a cyclic buffer of bounded size that holds the transitions observed recently. It also implements a.sample()method for selecting a random batch of transitions for training.
# Named tuples assign meaning to each position in a tuple and allow for
# more readable, self-documenting code
Transition = namedtuple('Transition', ('state', 'action', 'next_state', 'reward'))
class ExperienceReplay(object):
def __init__(self, capacity):
self.memory = deque([], maxlen=capacity)
def push(self, *args):
"""Save a transition"""
self.memory.append(Transition(*args))
def sample(self, batch_size):
return random.sample(self.memory, batch_size)
def __len__(self):
return len(self.memory)
Let’s make a memory for 10 random actions and print a few samples of it.
memory = ExperienceReplay(10)
state, info = env.reset()
for _ in range(10):
action = env.action_space.sample()
next_state, reward, terminated, truncated, _ = env.step(action.item())
memory.push(state, action, next_state, reward)
print("Number of items in memory: %d" % len(memory))
# the sample function returns a list of Transition object
samples = memory.sample(3)
print("Number of read samples from memory: %d" % len(samples))
print("Sample 0:", samples[0])
for sample in samples:
print(
"In state %d, doing action %d, moves the agent to state %d with reward %d!" %
(sample.state, sample.action, sample.next_state, sample.reward)
)
Number of items in memory: 10
Number of read samples from memory: 3
Sample 0: Transition(state=0, action=3, next_state=1, reward=0.0)
In state 0, doing action 3, moves the agent to state 1 with reward 0!
In state 0, doing action 1, moves the agent to state 8 with reward 0!
In state 0, doing action 0, moves the agent to state 4 with reward 0!
Deep Q-Network (DQN)#
We define a simple DQN network consisting of three blocks of Linear and ReLU layers:
The input to our network is a vector of 16 elements corresponding to the environment state size. All elements of this vector are set to 0 except the current state which is 1.
The output of our network is a vector of 4 elements corresponding to the environment action size (going left, right, up and down).
class DQN(nn.Module):
def __init__(self, state_size, action_size, embedding_dim):
super().__init__()
self.layer1 = nn.Linear(state_size, embedding_dim)
self.relu1 = nn.ReLU()
self.layer2 = nn.Linear(embedding_dim, embedding_dim)
self.relu2 = nn.ReLU()
self.layer3 = nn.Linear(embedding_dim, action_size)
def forward(self, x):
x = self.layer1(x)
x = self.relu1(x)
x = self.layer2(x)
x = self.relu2(x)
return self.layer3(x)
Agent#
We define an Agent module to facilitate the training process:
The
Agentcontains twoDQNinstances,policy_netandtarget_net.During the training, the
policy_nettries different actions and soft updates thetarget_netto ensure catastrophic forgetting does not occur.The
target_netis the network that we use at the test time.
Our Agent contains two functions:
select_actionwhich implements the exploration/exploitation of the environment. A larger value ofepsilonmeans that the agent randomly explores the action space at a higher rate.predictwhich is used at test time to decide which action to take given a state.
class Agent(nn.Module):
def __init__(self, env, args):
super().__init__()
self.device = args.device
self.steps_done = 0
self.epsilon = 1.0
self.max_eps = args.max_eps
self.min_eps = args.min_eps
self.eps_decay = args.eps_decay
state_size = env.observation_space.n
self.action_size = env.action_space.n
self.policy_net = DQN(state_size, self.action_size, args.embedding_dim).to(self.device)
self.target_net = DQN(state_size, self.action_size, args.embedding_dim).to(self.device)
self.target_net.load_state_dict(self.policy_net.state_dict())
self.memory = ExperienceReplay(2500)
def select_action(self, state):
self.epsilon = self.min_eps + (self.max_eps - self.min_eps) * np.exp(-self.steps_done * self.eps_decay)
self.steps_done += 1
if random.random() > self.epsilon:
with torch.no_grad():
# t.max(1) will return the largest column value of each row.
# the second column on the max result is the index of where the max
# element was found, so we pick an action with the larger expected reward.
return self.policy_net(state).max(1)[1].view(1, 1)
else:
return torch.tensor([[np.random.randint(0, self.action_size)]], device=self.device, dtype=torch.long)
def predict(self, state):
return torch.argmax(self.target_net(state))
3. Train/test routines#
The following routines are used to train/test our DQN.
Utility functions#
We implement two utility functions:
onehot_arrayconverts the state index into one-hot-array where are cells are set to 0 except for the cell corresponding to the state index which is set to 1.plot_with_moving_averageplots the raw results and its moving average.
def onehot_array(state, state_size, device):
onehot_state = np.zeros(state_size)
onehot_state[state] = 1
onehot_state = np.reshape(onehot_state, [1, state_size])
onehot_state = torch.tensor(onehot_state, dtype=torch.float32, device=device)
return onehot_state
def plot_with_moving_average(data, title, w=None, fmt='-'):
data = np.array(data)
if w is None:
w = np.maximum(len(data) // 20, 2)
fig = plt.figure(figsize=(16, 4))
ax = fig.add_subplot(1, 1, 1)
ax.plot(data, fmt, label='Raw data')
moving_average = np.convolve(data, np.ones(w), mode='valid') / w
ax.plot(np.arange(w-1, data.shape[0]), moving_average, label='Moving average')
ax.set_title(title, size=22)
ax.legend(fontsize=22)
Training loop#
We have implemented the training procedure in the episode_loop function which
consists of the following steps:
Choose random/policy action – Actions are chosen either randomly or based on a policy, see the
select_actionfunction in theAgentclass.Sample the environment – Performing the action in the environment and observing the results, see the
env.stepfunction.Store the transition in the memory – Calling the
agent.memory.pushfunction.Optimise – Run the optimisation step on every iteration. Optimisation picks a random batch from the memory to do training on the new policy. The “older”
target_netis used in optimisation to compute the expected \(Q\) values. See theoptimise_modelfunction.Soft update the
target_net– the weights from thepolicy_netis used to update thetarget_netwith thetauupdate rate.
The optimise_model function that performs a single step of the optimisation.
def optimise_model(agent, optimiser, criterion, args):
# wait till there are some actions in the memory
if len(agent.memory) < args.batch_size:
return None
transitions = agent.memory.sample(args.batch_size)
# Transpose the batch (see https://stackoverflow.com/a/19343/3343043 for
# detailed explanation). This converts batch-array of Transitions
# to Transition of batch-arrays.
batch = Transition(*zip(*transitions))
# Compute a mask of non-final states and concatenate the batch elements
# (a final state would've been the one after which the simulation ended)
non_final_mask = torch.tensor(
tuple(map(lambda s: s is not None, batch.next_state)),
device=args.device, dtype=torch.bool
)
non_final_next_states = torch.cat([s for s in batch.next_state if s is not None])
state_batch = torch.cat(batch.state)
action_batch = torch.cat(batch.action)
reward_batch = torch.cat(batch.reward)
# Compute Q(s_t, a) - the model computes Q(s_t), then we select the
# columns of actions taken. These are the actions which would've been taken
# for each batch state according to policy_net
state_action_values = agent.policy_net(state_batch).gather(1, action_batch)
# Compute V(s_{t+1}) for all next states.
# Expected values of actions for non_final_next_states are computed based
# on the "older" target_net; selecting their best reward with max(1)[0].
# This is merged based on the mask, such that we'll have either the expected
# state value or 0 in case the state was final.
next_state_values = torch.zeros(args.batch_size, device=args.device)
with torch.no_grad():
next_state_values[non_final_mask] = agent.target_net(non_final_next_states).max(1)[0]
# Compute the expected Q values
expected_state_action_values = (next_state_values * args.gamma) + reward_batch
loss = criterion(state_action_values, expected_state_action_values.unsqueeze(1))
# Optimize the model
optimiser.zero_grad()
loss.backward()
# In-place gradient clipping
torch.nn.utils.clip_grad_value_(agent.policy_net.parameters(), 100)
optimiser.step()
return loss
The episode_loop function plays one complete episode of the game. It terminates
either when the agent has reached the goal or fallen into a lake.
def episode_loop(agent, env, criterion, optimiser, device):
logs = {
'durations': [],
'rewards': [],
'epsilons': []
}
state_size = env.observation_space.n
state, info = env.reset()
state = onehot_array(state, state_size, device)
for t in count():
# 1. Choose random/policy action
action = agent.select_action(state)
# 2. Sample the environment
observation, reward, terminated, truncated, _ = env.step(action.item())
reward = torch.tensor([reward], device=device)
done = terminated or truncated
next_state = None if terminated else onehot_array(observation, state_size, device)
# 3. Store the transition in the memory
agent.memory.push(state, action, next_state, reward)
# Move to the next state
state = next_state
# 4. Optimise
# Perform one step of the optimization (on the policy network)
loss = optimise_model(agent, optimiser, criterion, args)
# 5. Soft update of the target network's weights
# θ′ ← τ θ + (1 −τ )θ′
target_net_state_dict = agent.target_net.state_dict()
policy_net_state_dict = agent.policy_net.state_dict()
for key in policy_net_state_dict:
target_net_state_dict[key] = policy_net_state_dict[key]*args.tau + target_net_state_dict[key]*(1-args.tau)
agent.target_net.load_state_dict(target_net_state_dict)
if done:
logs['durations'].append(t + 1)
logs['rewards'].append(reward.item())
logs['epsilons'].append(agent.epsilon)
break
return logs
Finally, we can use the main function to train our network.
def main(args):
agent = Agent(env, args)
optimiser = torch.optim.Adam(agent.policy_net.parameters(), lr=args.lr)
criterion = nn.MSELoss().to(args.device)
logs = {
'durations': [],
'rewards': [],
'epsilons': []
}
for episode_num in range(args.episodes):
episode_log = episode_loop(agent, env, criterion, optimiser, device)
for key in logs.keys():
logs[key].extend(episode_log[key])
if episode_num % args.log_frequency == 0 and episode_num > 0:
print(
'Episode [%.5d/%.5d] \tduration=%d\treward=%0.2f\tepsilon=%0.4f' % (
episode_num, args.episodes, np.mean(logs['durations']),
np.mean(logs['rewards']), np.mean(logs['epsilons'])
)
)
print('Complete')
return agent, logs
Let’s train our network for 5000 episodes.
args = set_args("--episodes", "5000")
print(args)
agent, train_logs = main(args)
Namespace(episodes=5000, batch_size=128, n_runs=20, lr=0.001, gamma=0.95, tau=0.005, max_eps=1.0, min_eps=0.01, eps_decay=0.001, embedding_dim=256, log_frequency=100, out_dir='./out/dqn_out/', device=device(type='cuda'))
Episode [00100/05000] duration=8 reward=0.04 epsilon=0.6791
Episode [00200/05000] duration=8 reward=0.03 epsilon=0.4923
Episode [00300/05000] duration=9 reward=0.03 epsilon=0.3724
Episode [00400/05000] duration=12 reward=0.10 epsilon=0.2881
Episode [00500/05000] duration=16 reward=0.18 epsilon=0.2330
Episode [00600/05000] duration=20 reward=0.26 epsilon=0.1959
Episode [00700/05000] duration=22 reward=0.32 epsilon=0.1694
Episode [00800/05000] duration=23 reward=0.35 epsilon=0.1495
Episode [00900/05000] duration=24 reward=0.37 epsilon=0.1340
Episode [01000/05000] duration=25 reward=0.40 epsilon=0.1216
Episode [01100/05000] duration=26 reward=0.41 epsilon=0.1115
Episode [01200/05000] duration=27 reward=0.42 epsilon=0.1030
Episode [01300/05000] duration=27 reward=0.44 epsilon=0.0959
Episode [01400/05000] duration=28 reward=0.44 epsilon=0.0897
Episode [01500/05000] duration=28 reward=0.44 epsilon=0.0844
Episode [01600/05000] duration=28 reward=0.45 epsilon=0.0798
Episode [01700/05000] duration=29 reward=0.46 epsilon=0.0757
Episode [01800/05000] duration=29 reward=0.46 epsilon=0.0720
Episode [01900/05000] duration=30 reward=0.47 epsilon=0.0688
Episode [02000/05000] duration=30 reward=0.47 epsilon=0.0658
Episode [02100/05000] duration=30 reward=0.47 epsilon=0.0632
Episode [02200/05000] duration=30 reward=0.47 epsilon=0.0608
Episode [02300/05000] duration=30 reward=0.47 epsilon=0.0585
Episode [02400/05000] duration=30 reward=0.47 epsilon=0.0565
Episode [02500/05000] duration=31 reward=0.47 epsilon=0.0547
Episode [02600/05000] duration=31 reward=0.47 epsilon=0.0529
Episode [02700/05000] duration=31 reward=0.48 epsilon=0.0514
Episode [02800/05000] duration=31 reward=0.48 epsilon=0.0499
Episode [02900/05000] duration=31 reward=0.48 epsilon=0.0485
Episode [03000/05000] duration=31 reward=0.49 epsilon=0.0472
Episode [03100/05000] duration=31 reward=0.49 epsilon=0.0460
Episode [03200/05000] duration=32 reward=0.50 epsilon=0.0449
Episode [03300/05000] duration=32 reward=0.50 epsilon=0.0438
Episode [03400/05000] duration=32 reward=0.50 epsilon=0.0428
Episode [03500/05000] duration=32 reward=0.51 epsilon=0.0419
Episode [03600/05000] duration=32 reward=0.51 epsilon=0.0410
Episode [03700/05000] duration=32 reward=0.51 epsilon=0.0402
Episode [03800/05000] duration=33 reward=0.51 epsilon=0.0394
Episode [03900/05000] duration=33 reward=0.52 epsilon=0.0386
Episode [04000/05000] duration=33 reward=0.52 epsilon=0.0379
Episode [04100/05000] duration=33 reward=0.52 epsilon=0.0372
Episode [04200/05000] duration=33 reward=0.52 epsilon=0.0366
Episode [04300/05000] duration=33 reward=0.52 epsilon=0.0360
Episode [04400/05000] duration=33 reward=0.52 epsilon=0.0354
Episode [04500/05000] duration=33 reward=0.52 epsilon=0.0348
Episode [04600/05000] duration=33 reward=0.52 epsilon=0.0343
Episode [04700/05000] duration=33 reward=0.53 epsilon=0.0338
Episode [04800/05000] duration=33 reward=0.53 epsilon=0.0333
Episode [04900/05000] duration=33 reward=0.53 epsilon=0.0328
Complete
Results#
Let’s plot the results and interpret them:
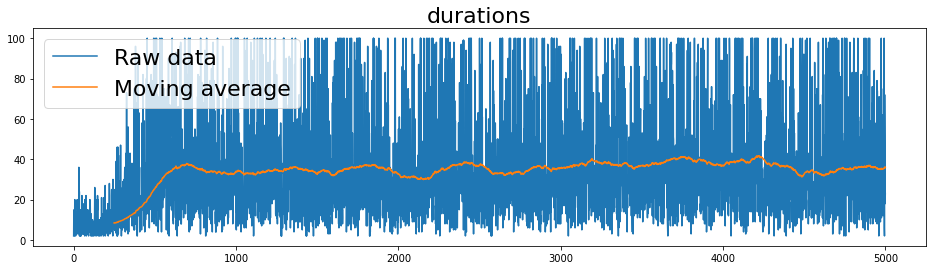
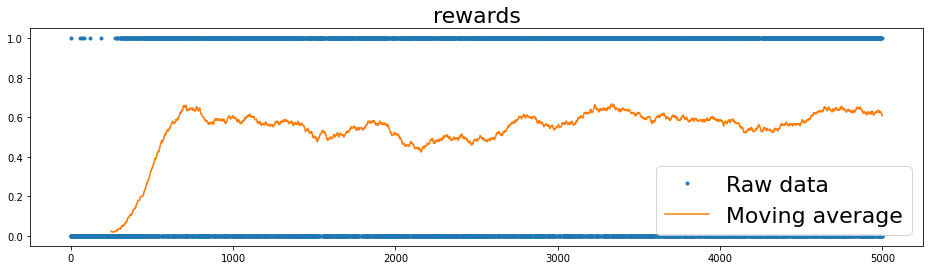
We can notice that the
durationsat the start is a small number and meaning that the agent was falling into one of the frozen lakes. As the training episodes progress, the agent learns better to play the gamedurationsstabilises at 33 actions.Similarly the
rewards(equivalent to winning rate) is a small number at the start and reaches 0.53 towards the end. Question What is the maximum theoretical winning rate in this game whenis_slippery=True?The value of
epsilonreduces steadily as the training procedure progress, suggesting the agent takes less random actions and relies on the learnt policy.
for key, val in train_logs.items():
fmt = '.' if key == 'rewards' else '-'
plot_with_moving_average(val, key, fmt=fmt)

Testing#
We have implemented the test_agent function that tests the network for
the given number of episodes. It’s important to rely on several testing
episodes to ensure the obtained results are not obtained by chance.
def test_agent(agent, env, episodes, device):
logs = {
'durations': [],
'rewards': [],
}
state_size = env.observation_space.n
with torch.no_grad():
for _ in range(episodes):
state, info = env.reset()
state = onehot_array(state, state_size, device)
for t in count():
action = agent.predict(state).detach().cpu()
observation, reward, terminated, truncated, _ = env.step(action.item())
done = terminated or truncated
if done:
logs['durations'].append(t + 1)
logs['rewards'].append(reward)
break
else:
# Move to the next state
state = None if terminated else onehot_array(observation, state_size, device)
return logs
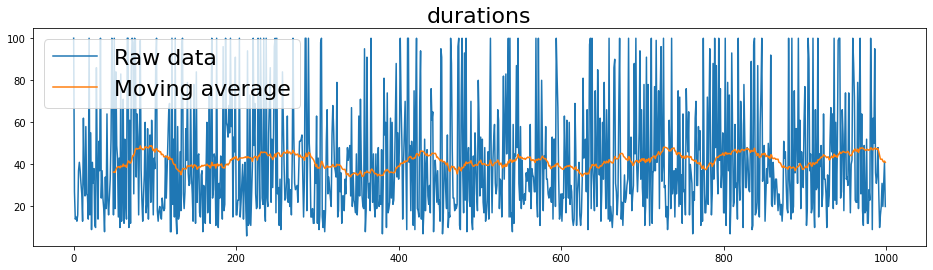
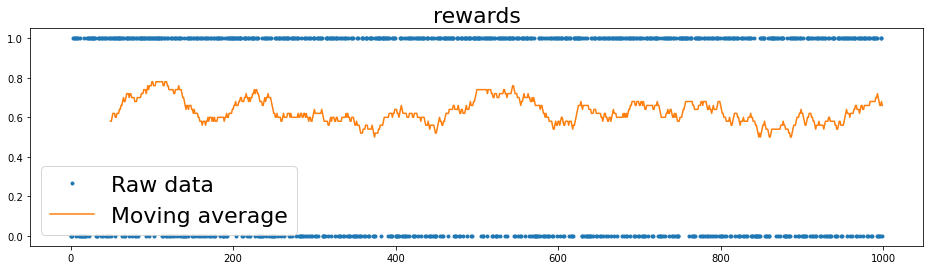
Results#
Finally, we test our network for 1000 episodes.
We can observe that it reaches a \(63\%\) winning rate.
Question What is the maximum theoretical winning rate in this game when is_slippery=True?
test_logs = test_agent(agent, env, 1000, args.device)
print('Test win rate: %.2f' % np.mean(test_logs['rewards']))
Test win rate: 0.63
for key, val in test_logs.items():
fmt = '.' if key == 'rewards' else '-'
plot_with_moving_average(val, key, fmt=fmt)
Excercises#
Below is a list of exercises to practice what we have learnt in this notebook:
Try a bigger grid (e.g., \(7 \times 7\)). Does the agent learn a bigger environment easily?
Test the network with an environment where
is_slippery=False. How does the performance change?
References#
The following sources inspire the materials in this notebook: