3. Optimisation and Learning#
This tutorial focuses on how representation/knowledge is learnt in deep neural networks.
In the beginning, the network’s weights are initialised from random distributions (e.g., uniform or Gaussian). Throughout the learning process, they get tuned to a set of useful features to perform the task they are being optimised to.
Broadly speaking, the learning process consists of:
Comparing the network’s output to the expected value (ground truth).
Using the backpropagation algorithm to compute the gradient of the loss function with respect to all network parameters.
Updating the weights by stepping in the direction of the gradient for a given parameter.
These three steps correspond to the following lines of code, typically implemented in any deep learning project (e.g., geometrical shape classification that we saw in the previous class.)
loss = criterion(output, target)
optimizer.zero_grad()
loss.backward()
optimizer.step()
By the end of this class, you will have a better understanding of:
What is a loss function?
The intuition behind optimisation algorithms.
How do hyperparameters influence the learning process? To answer these questions, we will look at a few simple binary classification toy examples.
0. Preparation#
Packages#
Let’s start with all the necessary packages to implement this tutorial.
numpy is the main Python package for scientific computing. It’s often imported with the
npshortcut.matplotlib is a library to plot graphs in Python.
torch is a deep learning framework that allows us to define networks, handle datasets, optimise a loss function, etc.
# importing the necessary packages/libraries
import numpy as np
from matplotlib import pyplot as plt
import random
import torch
import torch.nn as nn
import torchvision
Device#
To execute our code, we choose CPU or GPU based on the hardware availability. We check this by calling the torch.cuda.is_available() function that returns whether a CUDA driver is available.
In this toy example, even the CPU would be sufficient. although it will be fairly slow. However, in real-world applications, a GPU is always necessary.
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
1. Dataset#
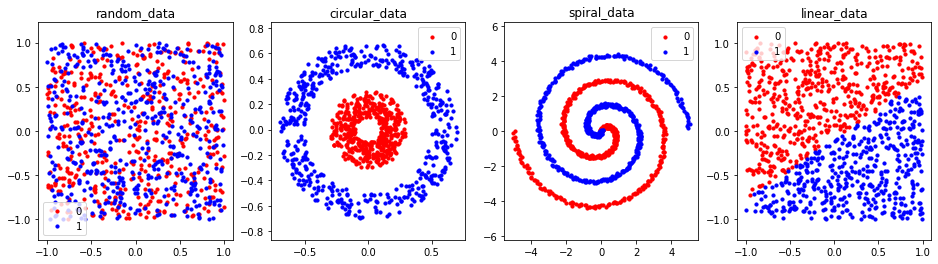
We define four datasets of 2D points (inspired by Tensorflow Playground and ConvnetJS Demo):
Linear: the data points are linearly separable.
Circular: the data points are separable by the radii of their circles.
Spiral: the data points follow the equation of Archimedean spiral in different directions.
Random: the data points are randomly generated in a 2D space.
The task is binary classification: the network has to learn to which category each point belongs.
Dataset utility functions#
We define a set of utility functions to generate our four datasets. All data generator functions return two variables:
pointsis a list ofnpoints with their \((x, y)\) coordinates. The shape of this array is \(n \times 2\).labelscorresponding to each point specifying its category (i.e., 0 or 1 ). The shape of this array is \(n\).
The points for each dataset are already centred at 0, therefore, we don’t need to call the normalize function.
def random_2d(num_points):
""""Generates a dataset of 2D points in the range of [-1, 1] with a random label assigned to them."""
points = np.random.uniform(-1, 1, (num_points, 2))
labels = np.random.randint(0, 2, num_points)
return points, labels
def circular_2d(num_points):
"""Generated a dataset of circular 2D points."""
half_num_pts = num_points // 2
# Those with label 0 have a radius in the range of [0.1, 0.3]
# Those with label 1 have a radius in the range of [0.5, 0.7]
polar_pts = np.array([
*np.array([np.random.uniform(0.1, 0.3, half_num_pts), np.random.uniform(0, np.pi * 2, half_num_pts)]).T,
*np.array([np.random.uniform(0.5, 0.7, half_num_pts), np.random.uniform(0, np.pi * 2, half_num_pts)]).T
])
# converting the polar points to cartesian coordinates
points = np.array([polar_pts[:, 0] * np.sin(polar_pts[:, 1]), polar_pts[:, 0] * np.cos(polar_pts[:, 1])]).T
labels = np.array([*[0] * half_num_pts, *[1] * half_num_pts])
return points, labels
def spiral_2d(num_points):
"""Generates a dataset of spiral 2D points."""
half_num_pts = num_points // 2
points = []
labels = []
# Points with label 0 swirl clockwise.
for i in range(half_num_pts):
r = i / half_num_pts * 5
t = 1.75 * i / half_num_pts * 2 * np.pi + 0
points.append([r * np.sin(t) + np.random.uniform(-0.1, 0.1), r * np.cos(t) + np.random.uniform(-0.1, 0.1)])
labels.append(0)
# Points with label 1 swirl unclockwise.
for i in range(half_num_pts):
r = i / half_num_pts * 5
t = 1.75 * i / half_num_pts * 2 * np.pi + np.pi
points.append([r * np.sin(t) + np.random.uniform(-0.1, 0.1), r * np.cos(t) + np.random.uniform(-0.1, 0.1)])
labels.append(1)
return np.array(points), np.array(labels)
def linear_2d(num_points):
"""Generates a dataset of 2D poins that are linearly seperable."""
points = np.random.uniform(-1, 1, (num_points, 2))
# The boundary line.
line = np.array([[-0.9, -0.7], [1.0, 0.6]])
# Points with label 0 are above the line and points with label 1 are below the line.
is_above = lambda p,l: np.cross(p - l[0], l[1] - l[0]) < 0
labels = []
for p in points:
labels.append(0 if is_above(p, line) else 1)
return points, np.array(labels)
Bonus Python question: The code for spiral_2d can be written in a nicer parametric way to avoid double-for-loops. Can you implement that?
Visualising the dataset#
We create the plot_db function that plots all the points of a dataset using the scatter function from matplotlib. The points are colour coded according to their labels.:
Points with label 0 are in red.
Points with label 1 are in blue.
def plot_db(data, title, ax=None):
points, labels = data
xs = points[:, 0]
ys = points[:, 1]
cdict = {0: 'red', 1: 'blue'}
if ax is None:
# if axis is not provided create a new figure.
fig = plt.figure(figsize=(4, 4))
ax = fig.add_subplot(1, 1, 1)
for l in np.unique(labels):
ix = np.where(labels == l)
ax.scatter(xs[ix], ys[ix], c=cdict[l], label=l, s=10)
ax.legend()
ax.set_title(title)
ax.axis('equal')
For each dataset type, we sample 1000 points. We put all four datasets into a dictionary. This allows us to access them easily by looping through all the dictionary items, for instance for visualisation.
number_points = 1000
dbs = {
'random_data': random_2d(number_points),
'circular_data': circular_2d(number_points),
'spiral_data': spiral_2d(number_points),
'linear_data': linear_2d(number_points)
}
Intuitively from the datasets plots, we can see that except for the random dataset, the rest are easily separable (at least to our eyes). The question we study in this tutorial is whether this holds for deep networks as well.
We can also observe that the \((x, y)\) coordinates of all four datasets are in the range of \((-std, +std)\). Therefore we do not need to apply the normalisation function (torchvision.transforms.Normalize(mean, std)).
fig = plt.figure(figsize=(16, 4))
for db_ind, (db_key, db_val) in enumerate(dbs.items()):
ax = fig.add_subplot(1, len(dbs), db_ind+1)
plot_db(db_val, db_key, ax)
Train/test splits#
For each dataset, we split the sampled points into two sets:
train containing 90% of the points.
test containing 10% of the points.
train_dbs = dict()
test_dbs = dict()
num_tests = number_points // 10
for db_ind, (db_key, db_val) in enumerate(dbs.items()):
points, labels = db_val
# creating a sorted array from 0 to 999 (number_points).
shuffle_inds = np.arange(number_points)
# we shuffle around the indices to obtain random train/test sets.
# the first 900 indices will belong to the training set and the rest test set
random.shuffle(shuffle_inds)
train_dbs[db_key] = points[shuffle_inds[:-num_tests]], labels[shuffle_inds[:-num_tests]]
test_dbs[db_key] = points[shuffle_inds[-num_tests:]], labels[shuffle_inds[-num_tests:]]
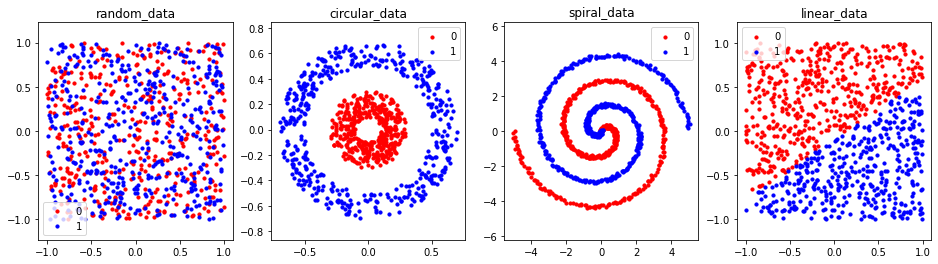
Plotting the train set. Visually the difference to the entire set is unrecognisable.
fig = plt.figure(figsize=(16, 4))
for db_ind, (db_key, db_val) in enumerate(train_dbs.items()):
ax = fig.add_subplot(1, len(dbs), db_ind+1)
plot_db(db_val, db_key, ax)
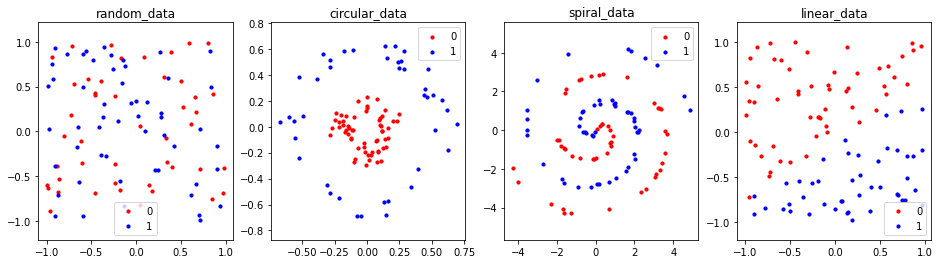
Plotting the test set. We can observe that points are much more sparse in comparison to the training set.
fig = plt.figure(figsize=(16, 4))
for db_ind, (db_key, db_val) in enumerate(test_dbs.items()):
ax = fig.add_subplot(1, len(dbs), db_ind+1)
plot_db(db_val, db_key, ax)
Python bonus question: we have used identical 4 lines of code to plot full/train/test datasets. Make the code nicer by creating a function for plotting four datasets. Call this function three times for full/train/test sets.
Evaluation#
We define accuracy as the metric to report the performance of an algorithm in correctly classifying the points into two categories. We define a function to compute the accuracy of the output in comparison to the ground truth.
def accuracy(y_pred, y_true):
"""Calculate accuracy (a classification metric)"""
correct = torch.eq(y_true, y_pred).sum().item() # torch.eq() calculates where two tensors are equal
acc = (correct / len(y_pred)) * 100
return acc
2. Model#
We have successfully created our datasets. Next, we design a simple network.
Simple2DNetworkis a subclass of thenn.Module. It must implement theforwardfunction.It only contains 3 layers, two linear and one non-linear activation function (ReLU).
class Simple2DNetwork(nn.Module):
def __init__(self, weight_init='uniform', nonlinearity=True):
super().__init__()
self.linear1 = nn.Linear(in_features=2, out_features=5) # in_features must be 2 because our data is (x, y).
self.linear2 = nn.Linear(in_features=5, out_features=1) # out_features equals 1 because of binary classification.
self.nonlinearity = nonlinearity
if nonlinearity:
self.relu = nn.ReLU()
# initialising the weights and their biases
if weight_init == 'uniform':
nn.init.uniform_(self.linear1.weight)
nn.init.uniform_(self.linear2.weight)
elif weight_init == 'xavier':
nn.init.xavier_normal_(self.linear1.weight)
nn.init.xavier_normal_(self.linear2.weight)
# Define a forward method containing the forward pass computation
# It's common to use the same variable name throughout the forward stream, in this case "x".
# This is only to simplify coding, input/outpts to all layers would have the same variable name.
def forward(self, x):
# The input data is processed by the first linear layer.
x = self.linear1(x)
if self.nonlinearity:
# The output of the first layer is rectified with ReLU.
x = self.relu(x)
# The second linear layer produces the output value.
x = self.linear2(x)
return x
# Creating an instance of the model and send it to target device
model = Simple2DNetwork().to(device)
print(Simple2DNetwork())
Simple2DNetwork(
(linear1): Linear(in_features=2, out_features=5, bias=True)
(linear2): Linear(in_features=5, out_features=1, bias=True)
(relu): ReLU()
)
In theory, we could have created our Simple2DNetwork with fewer lines of code using nn.Sequential:
model = nn.Sequential(
nn.Linear(in_features=2, out_features=5),
nn.ReLU(),
nn.Linear(in_features=5, out_features=1)
)
This implementation is useful when prototyping very simple networks. As soon as the network becomes a bit more complicated (e.g., the weight-initialisation/nonlinearity if statement), one has to create a class as we did in the previous cell.
3. Loss#
How do we know if the output of our network is good or bad? We need a metric to quantify how close the output is to ground truth. A loss function calculates the error of the output. The smaller the better.
Loss function measures the degree of dissimilarity of obtained result to the target value, and it is the loss function that we want to minimise during training. To calculate the loss we make a prediction using the inputs of our given data sample and compare it against the true data label value.
There are several loss functions implemented in deep learning frameworks (e.g. PyTorch Loss Functions. Going through all of them is beyond the purpose of this tutorial. We only look at four of those in this tutorial:
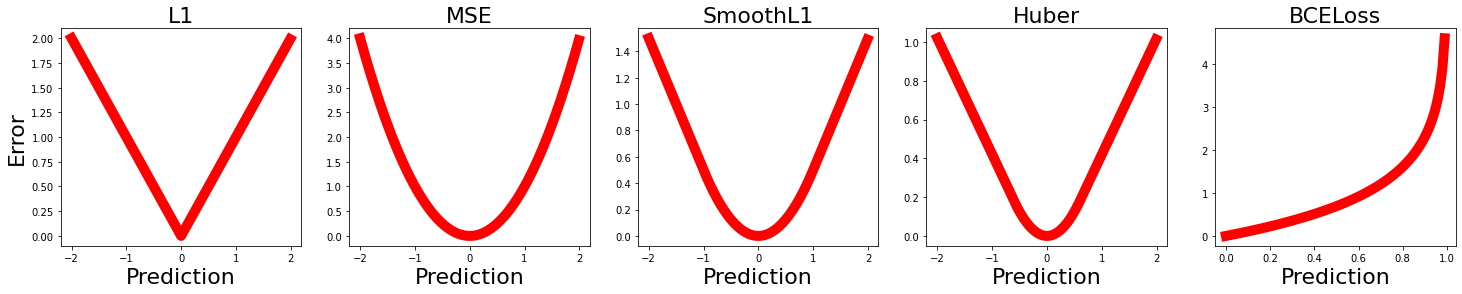
nn.L1Lossis the mean absolute error (MSA).nn.MSELossis the mean square error (MSE) also known as L2.nn.SmoothL1Lossandnn.HuberLosscombine L1 (MSA) and L2 (MSE) together.nn.BCELoss(Binary Cross Entropy) is designed for binary classification problems (contrary to the other losses explained above that are typically used in a regression problem). In practice, we often use BCEWithLogitsLoss that combines a Sigmoid layer and the BCELoss in one single class.
To have a better intuition about each of these loss functions, we plot the error as a function of prediction value for a scenario where the ground truth equals 0.
Qualitatively all the “regression” losses (i.e., L1, MSE, SmoothL1 and Huber) are similar but the degree of smoothness varies from the minimum to maximum error. It can also be noted that the maximum error varies in those losses.
In the “classification” loss (Binary Cross Entropy) error exponentially increases as prediction deviates from the ground truth.
losses = {
'L1': nn.L1Loss(reduction='none'),
'MSE': nn.MSELoss(reduction='none'),
'SmoothL1': nn.SmoothL1Loss(reduction='none'),
'Huber': nn.HuberLoss(reduction='none', delta=0.6),
'BCELoss': nn.BCELoss(reduction='none'),
}
fig = plt.figure(figsize=(5 * len(losses), 4))
for loss_ind, (loss_key, loss_val) in enumerate(losses.items()):
if loss_key in ['BCELoss']:
# in Binary Cross Entropy the output is between o to 1 (corresponding to two categories).
x_vals = torch.tensor(np.arange(0, 1, 0.01))
target = torch.zeros(x_vals.shape).double()
else:
x_vals = torch.tensor(np.arange(-2, 2, 0.01))
target = torch.zeros(x_vals.shape)
ax = fig.add_subplot(1, len(losses), loss_ind+1)
y_vals = loss_val(x_vals, target)
ax.plot(x_vals, y_vals, color='red', linewidth=10)
ax.set_title(loss_key, size=22)
ax.set_xlabel('Prediction', size=22)
if loss_ind == 0:
ax.set_ylabel('Error', size=22)
Custom loss#
On many occasions, one needs to implement its own loss function. For instance, imagine circular data (e.g., hue or angle). In these scenarios, the error between \(0\) and \(2 \pi\) degree should be 0. If we use the above-mentioned loss, the error would be the maximum error.
Question for one of the regression loss functions (e.g., MSE) implement its circular version.
4. Optimizer#

If you are on top of a large valley and want to navigate to the bottom of it (in this picture the lake), what would be the best strategy? It is very hard to see an optimal way. So we use an iterative method, to improve it every time.
Random search: having a set of W, and just TRY. And using it would be horrible and need a lifetime to finish.
Using the local geometry. Maybe we can’t just see the bottom of the valley, but use your foot to feel the slope of the ground and take which way will take you a bit down to the valley.
What is the slope? The slope is the derivative of the loss function.
Gradient: it will give you the direction of the greatest increase to the target function; and if you look at the negative gradient, you will find the direction of the greatest decrease to the target function.
There are several different optimizers. Read more about them here.
PyTorch gradients#
To compute those gradients, PyTorch has a built-in differentiation engine called torch.autograd. It supports the automatic computation of gradients for any computational graph.
We can only obtain the grad properties for the leaf nodes of the computational graph, which have the requires_grad property set to True. For all other nodes in our graph, gradients will not be available.
By default, all tensors with requires_grad=True are tracking their computational history and support gradient computation. For instance, if we print the weights of one layer in our model:
print(model.linear1.weight)
We see that requires_grad=True:
Parameter containing:
tensor([[0.7372, 0.4555],
[0.5298, 0.3239],
[0.8900, 0.8310],
[0.4538, 0.2562],
[0.8395, 0.6339]], device='cuda:0', requires_grad=True
There are some cases when we do not need to compute the gradients, for example:
Evaluation: when we have trained the model and just want to apply it to some input data, i.e. we only want to do forward computations through the network.
Transfer-learning when we want to transfer a set of weights from a pretrained network to a new network without altering them (also known as frozen weights).
Constructing an optimizer#
In this toy example, we create an instance of the Stochastic Gradient Descent (SGD) optimizer.
torch.optim.SGD requires at least two arguments:
paramswhich parameters to optimise, in this scenario all our model’s parameters.lr(learning rate) which defines how fast the parameters are to be updated. Smaller values yield slow learning speed, while large values may result in unpredictable behaviour during training.
In our example, all parameters are updated with a unique learning rate. However, torch.optim also support specifying per-parameter options. To do this, you have to pass in an iterable of dicts. For instance:
optimizer = torch.optim.SGD(params=[
{'params': model.linear1.parameters()},
{'params': model.linear2.parameters(), 'lr': 1e-3}
], lr=learning_rate)
Sets a different learning rate for the linear2 layer.
For more details, see PyTorch documentation.
learning_rate = 0.1
optimizer = torch.optim.SGD(params=model.parameters(), lr=learning_rate)
5. Weights initialisation#
In the valley picture, depending on where you’re standing you might see different paths. Your initial position can influence your journey and where you end up. Correspondingly, in neural networks, the initial weights of all layers can have an impact on the learning outcome. While this is outside of the scope of this tutorial. We just look at a few weight initialization techniques to familiarise ourselves with this possibility. torch.nn.init supports several diferent initilisation techniques.
A few cells back where we defined our model, we used these few lines to support two initialisation, namely, uniform and xavier_normal:
if weight_init == 'uniform':
nn.init.uniform_(self.linear1.weight)
nn.init.uniform_(self.linear2.weight)
elif weight_init == 'xavier':
nn.init.xavier_normal_(self.linear1.weight)
nn.init.xavier_normal_(self.linear2.weight)
Untrained features#
Let’s make a prediction using our model without any training. How good untrained features can do in this binary classification problem?
In this tutorial, we look at the linear dataset. Question: is there a performance difference on other datasets?
To input our model with the test datasets, we have to first convert them from numpy arrays to torch tensors. We simply do that by calling the torch.tensor function. Note that this toy example is very small and we don’t need to pass the data to the model in different batches. Therefore, we don’t need to use the dataloader routines (torch.utils.data.DataLoader) common to deep learning projects (e.g., geometrical shape classification that we studied in the previous class).
which_db = 'linear_data'
input_data = torch.tensor(test_dbs[which_db][0]).float().to(device)
target = torch.tensor(test_dbs[which_db][1]).to(device)
model.eval()
untrained_preds = model(input_data)
print(f"Length of predictions: {len(untrained_preds)}, Shape: {untrained_preds.shape}")
print(f"Length of test samples: {len(target)}, Shape: {target.shape}")
print(f"\nFirst 10 predictions:\n{untrained_preds[:10]}")
print(f"\nFirst 10 test labels:\n{target[:10]}")
Length of predictions: 100, Shape: torch.Size([100, 1])
Length of test samples: 100, Shape: torch.Size([100])
First 10 predictions:
tensor([[-0.1886],
[-0.3800],
[-0.4163],
[ 0.1121],
[-0.3573],
[-0.0200],
[ 0.1609],
[-0.1718],
[-0.3529],
[ 0.2985]], device='cuda:0', grad_fn=<SliceBackward0>)
First 10 test labels:
tensor([0, 1, 0, 1, 1, 0, 0, 1, 1, 0], device='cuda:0')
From the output of the previous cell, we can observe that the model output is a continuous value contrary to the ground truth that is discrete (0 or 1). This is because the model output is a probability of belonging to category 0 or 1.:
The closer to 0, the more the model thinks the sample belongs to class 0.
The closer to 1, the more the model thinks the sample belongs to class 1.
More specifically:
If
pred_probs< 0.5,y=0(category 0)If
pred_probs>= 0.5,y=1(category 1)
So, to compute the accuracy, we should convert the probabilities to a label by the above equation.
Furthermore, we can see that the shape of the prediction is [100, 1] therefore we have to call the squeeze() function to get rid of this unnecessary extra dimension and convert the prediction to a vector.
untrained_preds_labels = untrained_preds >= 0.5
untrained_acc = accuracy(untrained_preds_labels.squeeze(), target)
print('The accuracy with untrained features: %.1f%%.' % untrained_acc)
The accuracy with untrained features: 50.0%.
We obtain an accuracy close to the chance level (\(50\%\)) demonstrating that the untrained features cannot solve the task and they need to be tuned.
Xavier Normal Distribution#
Let’s fill in our model with xavier_normal and check whether the initial performance would be different. The initial performance is still at the chance level.
Question: investigate whether the initialisation technique has an impact on the training.
model = Simple2DNetwork('xavier').to(device)
model.eval()
untrained_preds = model(input_data)
untrained_preds_labels = untrained_preds >= 0.5
untrained_acc = accuracy(untrained_preds_labels.squeeze(), target)
print('The accuracy with Xavier untrained features: %.1f%%.' % untrained_acc)
The accuracy with Xavier untrained features: 56.0%.
6. Backpropagation#
Backpropagation computes the gradient of a loss function with respect to the weights of the network for a single input–output example, and does so efficiently, computing the gradient one layer at a time, iterating backwards from the last layer to avoid redundant calculations of intermediate terms in the chain rule (Wikipedia). For a more detailed walkthrough of this process, check out this video on backpropagation from 3Blue1Brown.
Intuitively, to update layers’ weights, we need to determine the effect of changing weights for a given layer on the final error (also known as the partial derivative of the error function with respect to that weight). To do that we can use the chain rule to propagate error gradients backwards through the network.
PyTorch does that for us by calling the loss.backward() function.
7. The full picture#
We have all the building blocks for training our network. Now we can check how loss, optimizer and backpropagation come to the full picture. The entire processing pipeline can be summarised in five points:
Forward pass: make a prediction with the current set of weights. In the code language,
prediction = model(input_data)which calls theforwardfunction of our model.Computing loss: check how off the prediction is according to the loss function. In the code language,
loss = criterion(prediction, target).Reseting gradients: to prevent double-counting the gradients we explicitly zero them at each iteration. In code lanague,
optimizer.zero_grad().Backpropagating: backward pass to propagate the error to all model parameters. In code language,
loss.backward().Updating weights: updating model parameters based on the calculated derivatives. In code language,
optimizer.step().
def epoch_loop(model, db, criterion, optimiser):
# usually the code for train/test has a large overlap.
is_train = False if optimiser is None else True
# model should be in train/eval model accordingly
model.train() if is_train else model.eval()
with torch.set_grad_enabled(is_train):
# moving the image and GT to device
input_data = torch.tensor(db[0]).float().to(device)
target = torch.tensor(db[1]).float().to(device)
# 1. forward pass
prediction = model(input_data)
# making it one hot vector
prediction = prediction.squeeze()
pred_labels = prediction >= 0.5
# 2. computing the loss function
loss = criterion(prediction, target)
# computing the accuracy
acc = accuracy(pred_labels, target)
if is_train:
# 3. reseting gradients
optimiser.zero_grad()
# 4. Backpropagating the loss
loss.backward()
# 5. Updating weights
optimiser.step()
return acc, loss.item(), pred_labels.detach().cpu().numpy()
Train/test one a single dataset#
Let’s train our network on the circular_data with the L1 loss.
Questions play with other datasets and loss functions:
Is there a single loss function that works best across all datasets?
What happens when you decrease the learning rate?
What happens when you reduce the number of epochs?
Do we need the same number of epochs across all datasets to reach perfect accuracy?
model = Simple2DNetwork().to(device)
criterion = nn.L1Loss()
learning_rate = 0.1
optimizer = torch.optim.SGD(params=model.parameters(), lr=learning_rate)
# doing epoch
which_db = 'circular_data'
epochs = 1000
print_freq = epochs // 10
initial_epoch = 0
train_logs = {'acc': [], 'loss': [], 'pred': []}
val_logs = {'acc': [], 'loss': [], 'pred': []}
for epoch in range(initial_epoch, epochs):
train_log = epoch_loop(model, train_dbs[which_db], criterion, optimizer)
val_log = epoch_loop(model, test_dbs[which_db], criterion, None)
if np.mod(epoch, print_freq) == 0:
print('[%.2d] Train loss=%.4f acc=%0.2f [%.2d] Test loss=%.4f acc=%0.2f' %
(
epoch, np.mean(train_log[1]), np.mean(train_log[0]),
epoch, np.mean(val_log[1]), np.mean(val_log[0])
))
train_logs['acc'].append(np.mean(train_log[0]))
train_logs['loss'].append(np.mean(train_log[1]))
train_logs['pred'].append(train_log[2])
val_logs['acc'].append(np.mean(val_log[0]))
val_logs['loss'].append(np.mean(val_log[1]))
val_logs['pred'].append(val_log[2])
[00] Train loss=0.5985 acc=42.89 [00] Test loss=0.4753 acc=62.00
[100] Train loss=0.3724 acc=64.67 [100] Test loss=0.2720 acc=76.00
[200] Train loss=0.3212 acc=71.33 [200] Test loss=0.2263 acc=81.00
[300] Train loss=0.2264 acc=81.00 [300] Test loss=0.1663 acc=90.00
[400] Train loss=0.1743 acc=97.67 [400] Test loss=0.1660 acc=100.00
[500] Train loss=0.2052 acc=96.00 [500] Test loss=0.2041 acc=99.00
[600] Train loss=0.2013 acc=96.44 [600] Test loss=0.2007 acc=99.00
[700] Train loss=0.1990 acc=97.00 [700] Test loss=0.1986 acc=99.00
[800] Train loss=0.1959 acc=97.67 [800] Test loss=0.1980 acc=99.00
[900] Train loss=0.1969 acc=97.33 [900] Test loss=0.1973 acc=99.00
Reporting results#
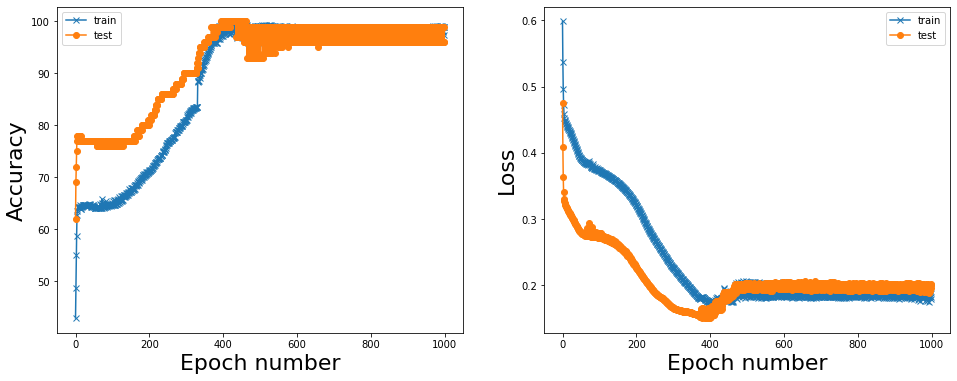
We can see that the accuracy steadily increases and loss decreases as a function of epoch number. In this toy example network reaches almost perfect accuracy in about 600-700 epochs.
fig = plt.figure(figsize=(16, 6))
ax = fig.add_subplot(1, 2, 1)
ax.plot(train_logs['acc'], '-x', label='train')
ax.plot(val_logs['acc'], '-o', label='test')
ax.set_ylabel('Accuracy', size=22)
ax.set_xlabel('Epoch number', size=22)
ax.legend()
ax = fig.add_subplot(1, 2, 2)
ax.plot(train_logs['loss'], '-x', label='train')
ax.plot(val_logs['loss'], '-o', label='test')
ax.set_ylabel('Loss', size=22)
ax.set_xlabel('Epoch number', size=22)
ax.legend()
<matplotlib.legend.Legend at 0x7f7314334a30>